
IntelliMan’s heterogeneous set of use cases generates the right mix of challenges and requirements able to produce a general AI-based solution framework for the manipulation problem. This manipulation system must be able to understand which are the relevant skills and structures independently from the object shape, size, weight, surface characteristics, etc., fully exploiting the interaction with the environment and the human, disregarding from the interface type and manipulator structure.
Use Case 1

Demonstrator focuses on three key areas:
Use Case 2

Evaluation of a plan for high-level pick-up and place: moving objects to a given location based on a generated plan that involves the movement of the robot between two locations, getting the precise position and orientation of the object, and picking and placing them considering their constraints, as shown in the videos below
Use Case 3

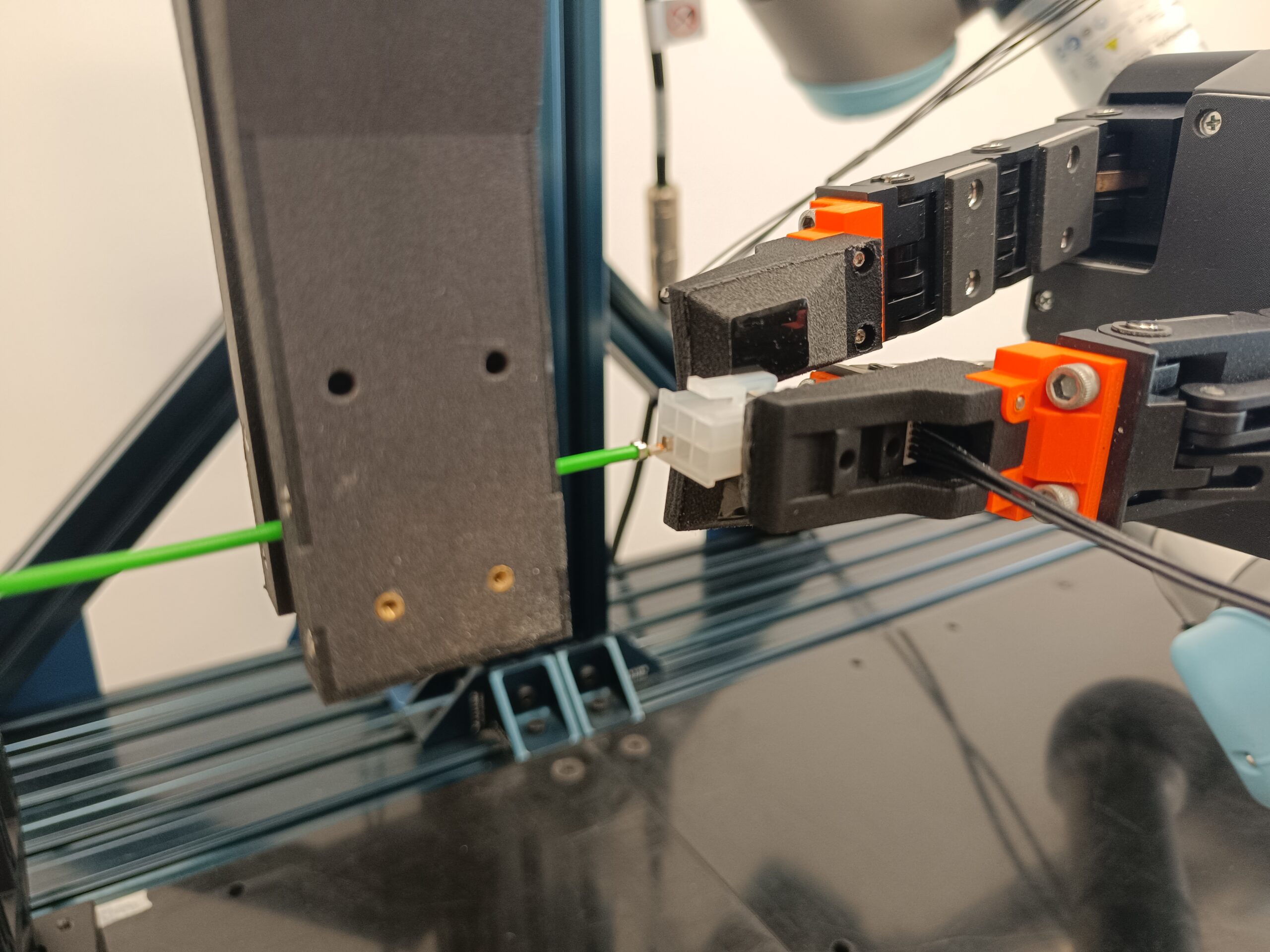
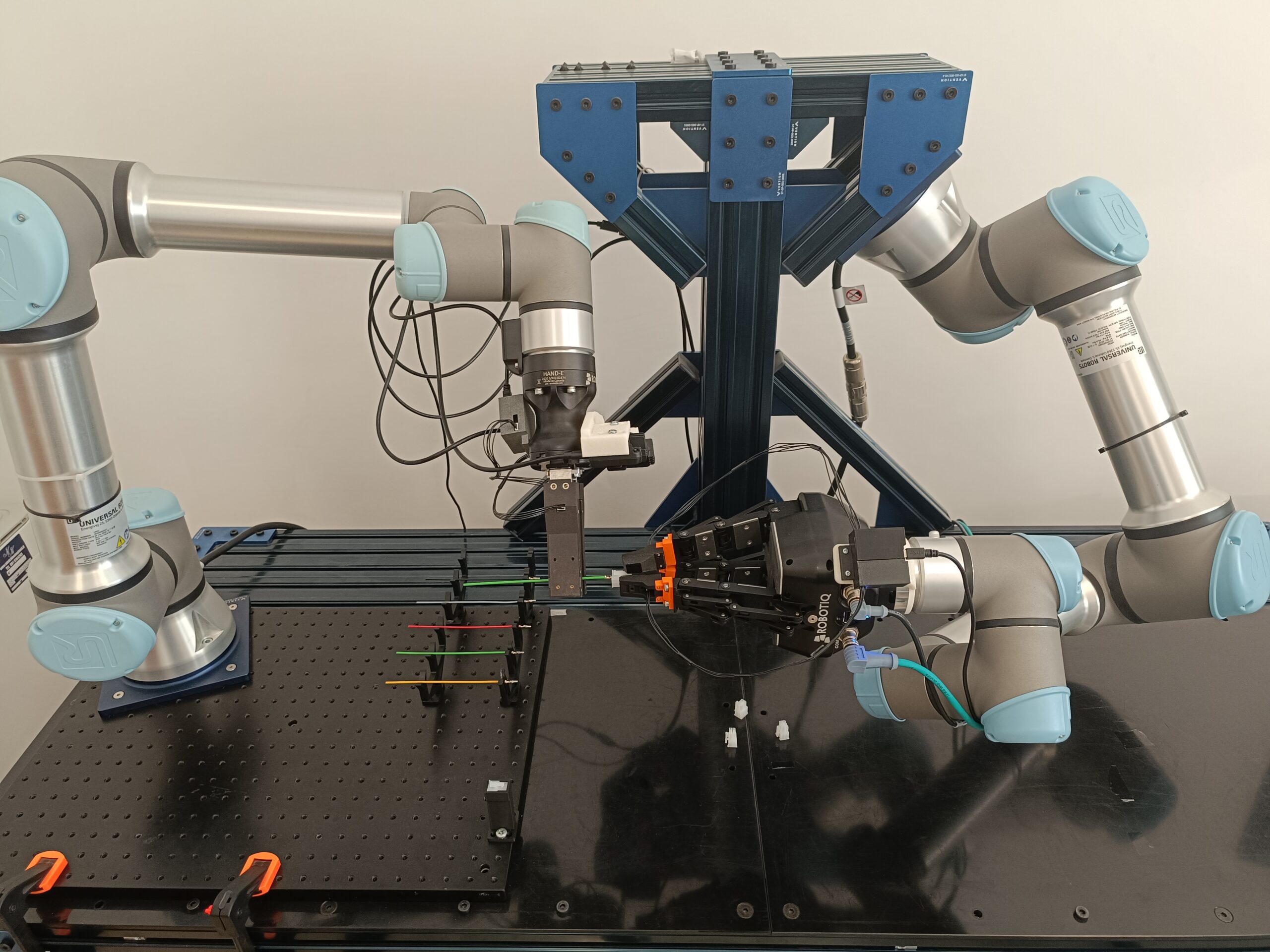
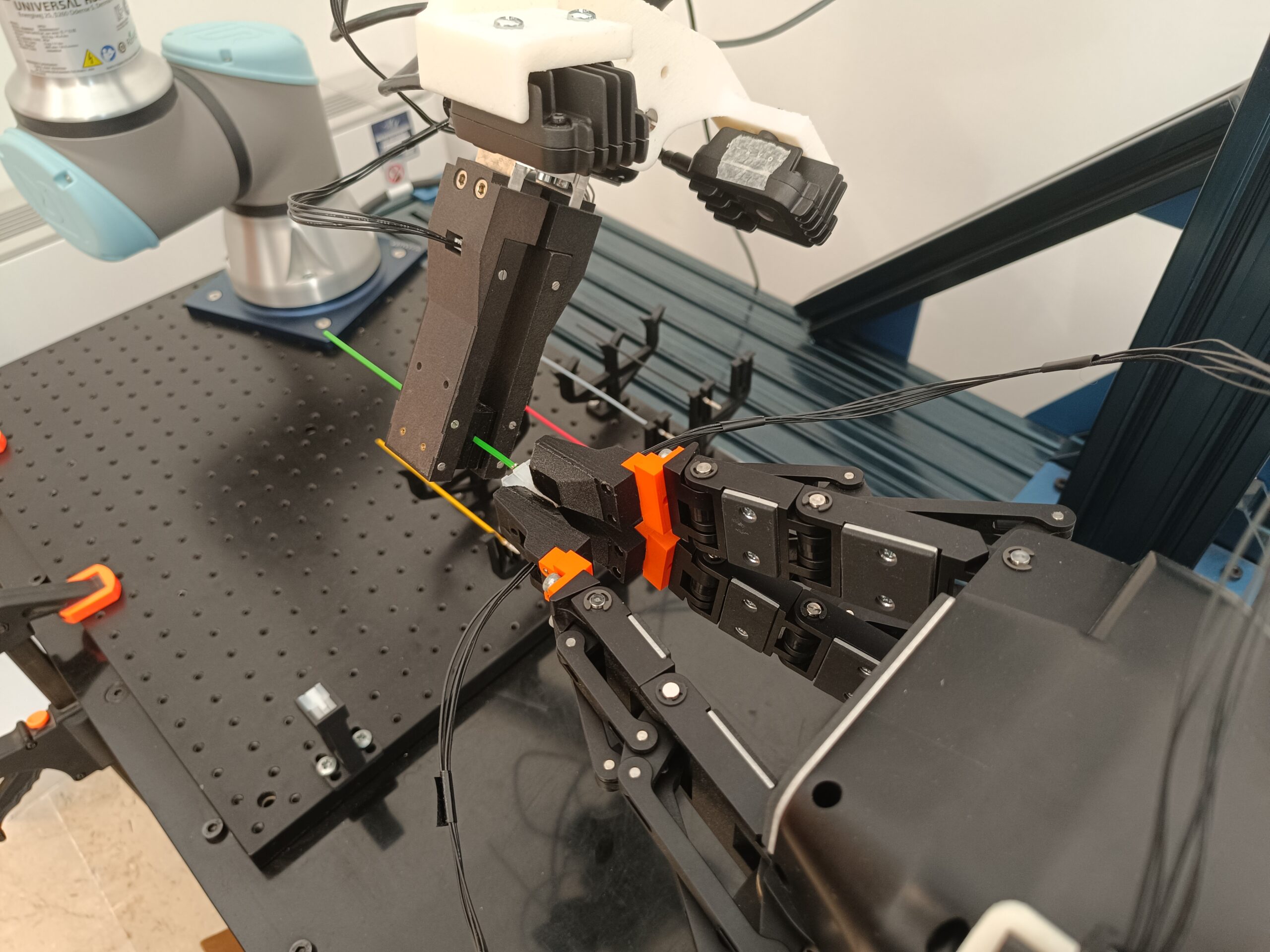
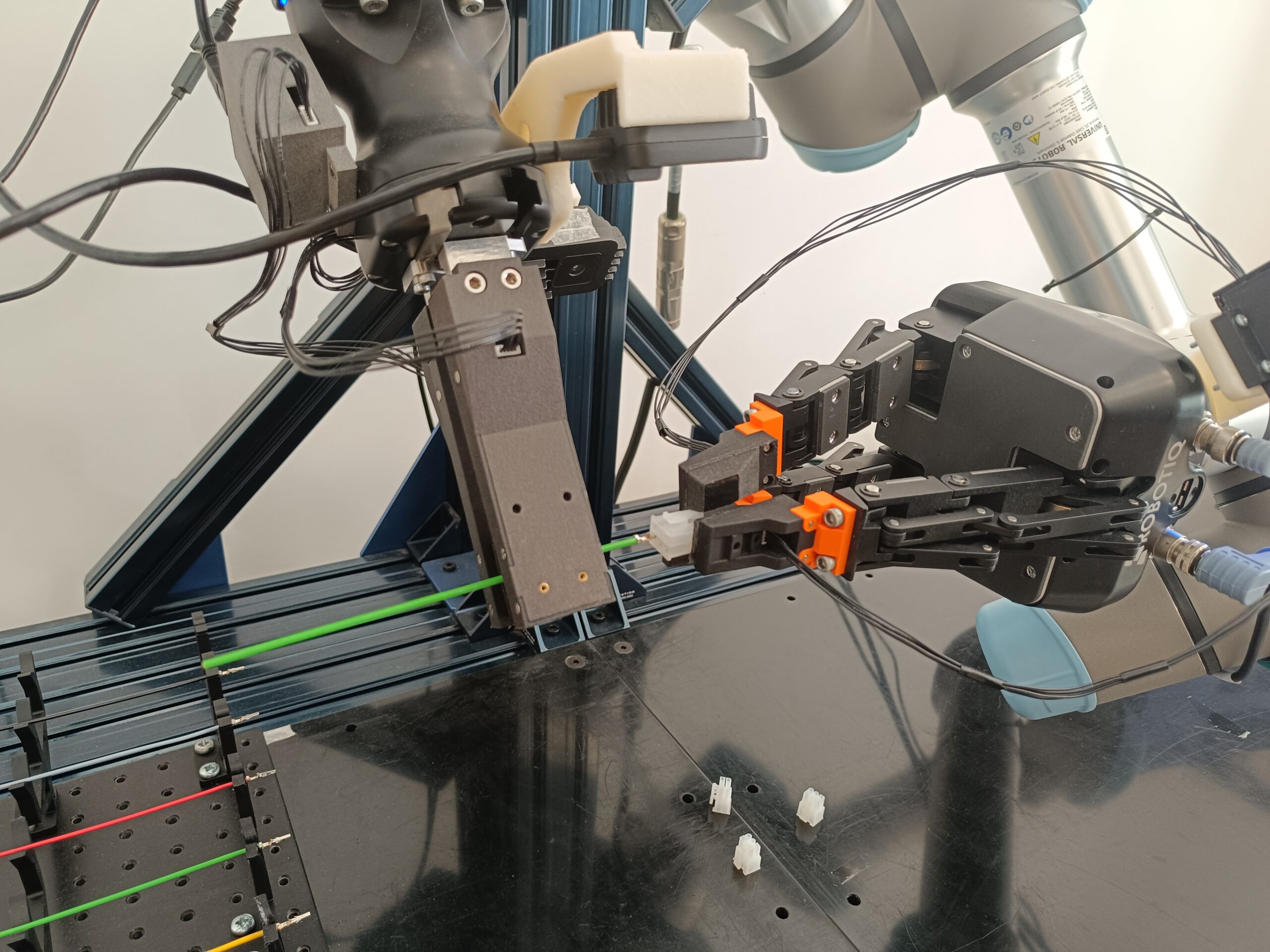
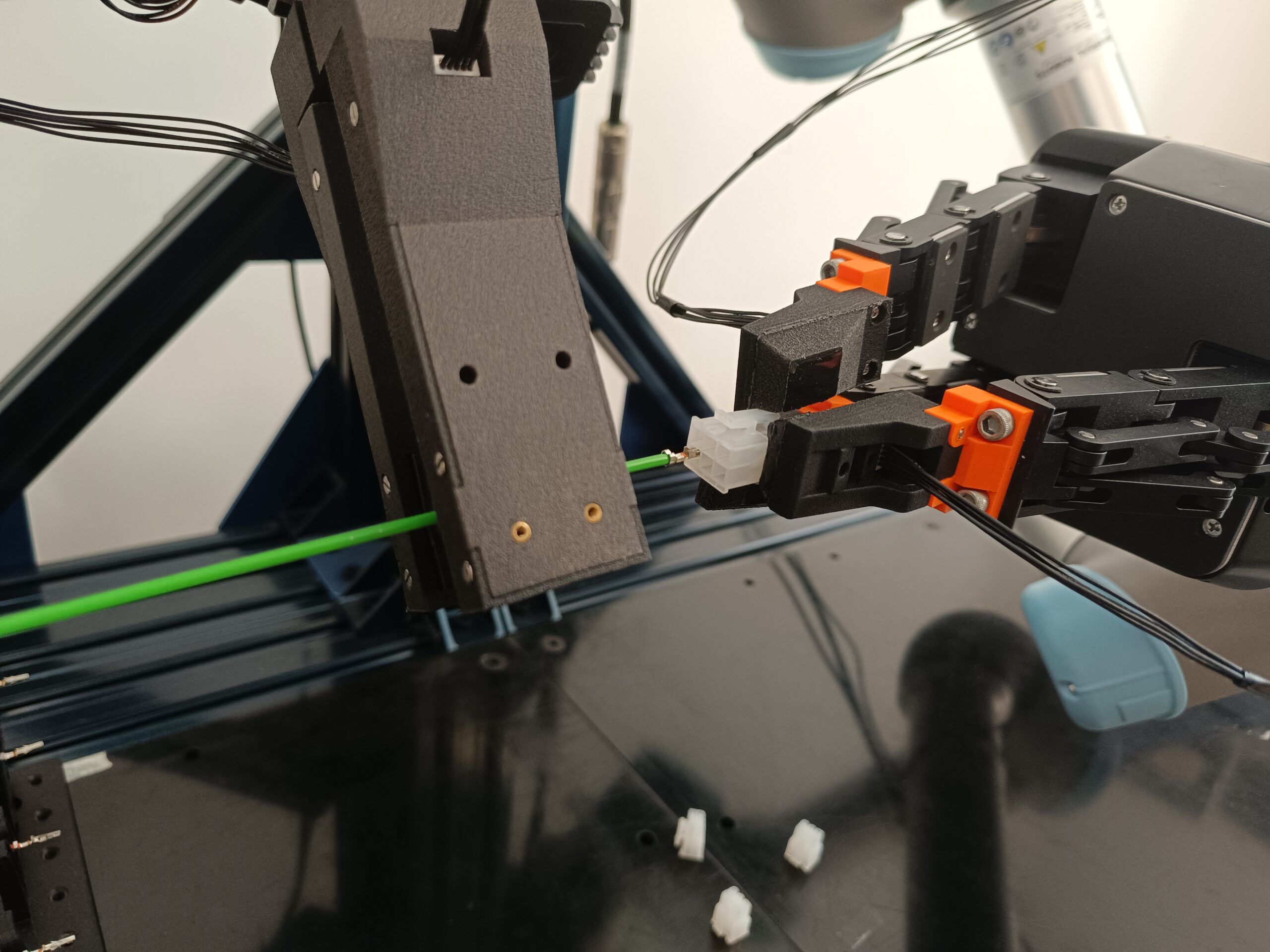
The connector is picked from a predefined location, while the wires are grasped from a specialized collector. A stereo vision system estimates the wire pose, and tactile feedback is used to monitor the insertion phase. The process is executed by a dual-arm platform, where each arm is dedicated to one component (connector and wires, respectively).

{kind=link}
The assembly process is executed by a dual-arm robotic platform, with each manipulator dedicated to a specific component (connector and wires). A stereo vision system is utilized to perform pose estimation for both the connector and the wires, which are retrieved from a specialized collector. The insertion phase is actively monitored via tactile feedback.

{kind=link}

{kind=link}

{kind=link}

{kind=link}
Use Case 4
