
Making robotic manipulation execution adaptive and context-aware by using knowledge representation and reasoning

{kind=link}

{kind=link}
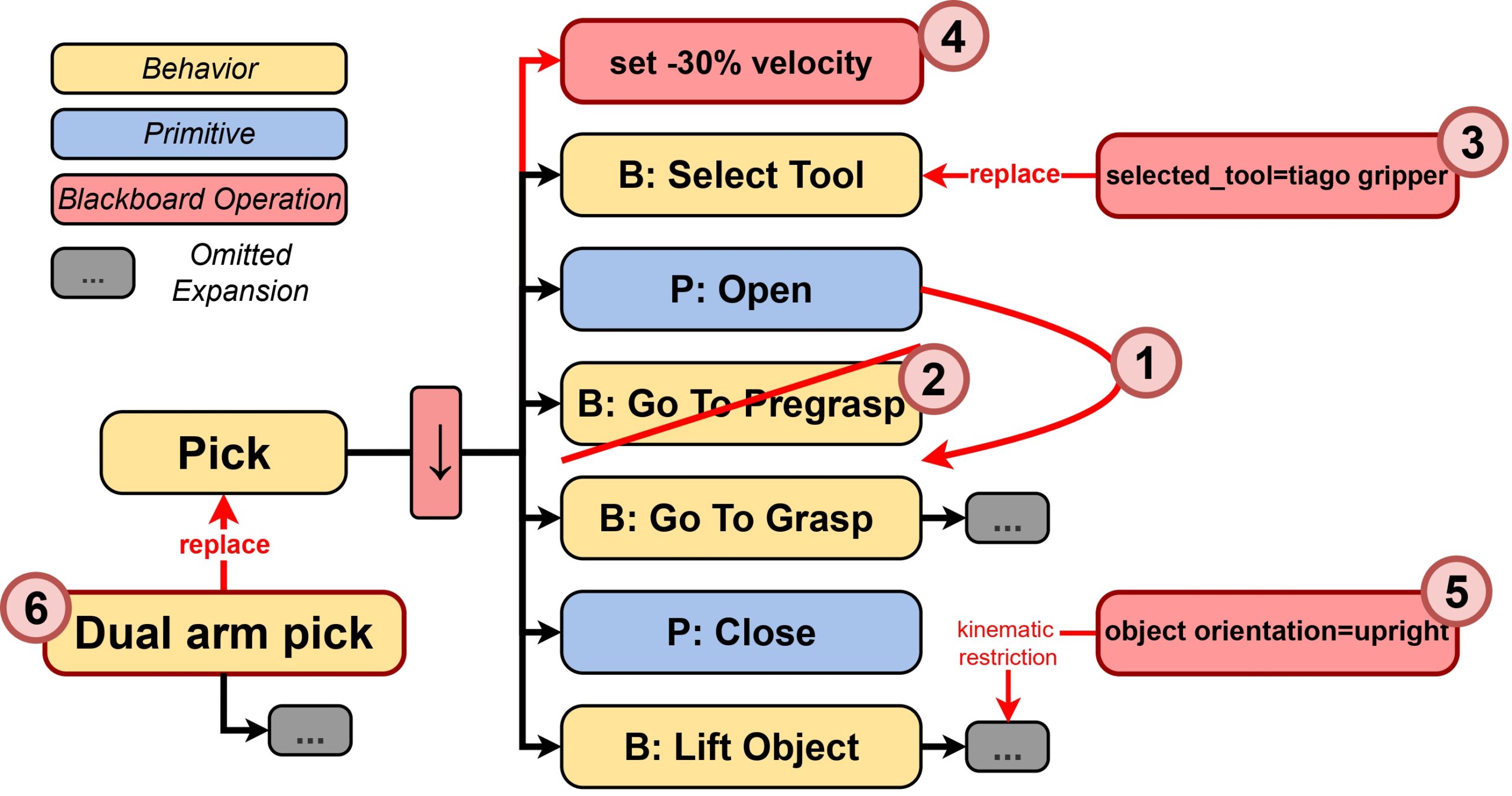
To support robust and context-sensitive execution of task plans, UPC has proposed a method for constructing Behavior Trees (BTs) informed by semantic reasoning. Instead of relying on static, hand-crafted templates, the approach uses ontologies to select and apply ontologically defined modifiers, called flavors, that parameterize and adapt general BT structures. These flavors are selected through SPARQL queries to the ontology, allowing the system to reason about the task and environment and apply the most appropriate execution configuration. This results in BTs that are tailored to the plan and the situational context.
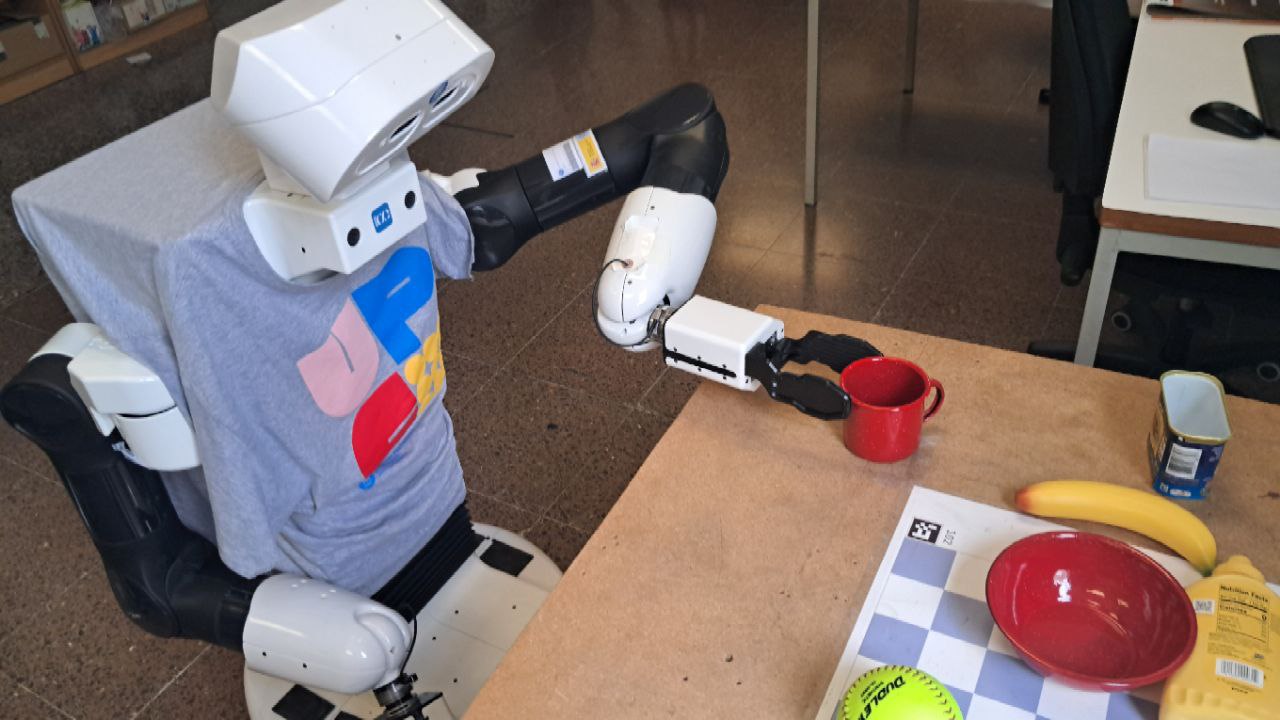
The approach has been demonstrated in a kitchen manipulation scenario, where the system generates plans based on the current situation, and then builds BTs adapted with different flavors, enabling the robot to carry out the task more robustly in a dynamic environment.
👉 Article link: Automating Adaptive Execution Behaviors for Robot Manipulation https://doi.org/10.1109/ACCESS.2022.3223995.