
Advances in Flexible Manufacturing: ELVEZ’s Progress in the IntelliMan Project
How can a robot handle and manipulate deformable linear objects such as wires?
At ELVEZ, as part of the EU-funded IntelliMan Project, we are tackling this complex challenge by developing intelligent robotic systems capable of autonomously assembling connectors – a task that requires exceptional precision and adaptability.
Smart Robotics for Connector Assembly
Connector assembly involves multiple variables: connector type, number of pins, insertion force, orientation, and wire flexibility. To manage this, IntelliMan leverages AI-powered perception through tactile sensors and vision systems.
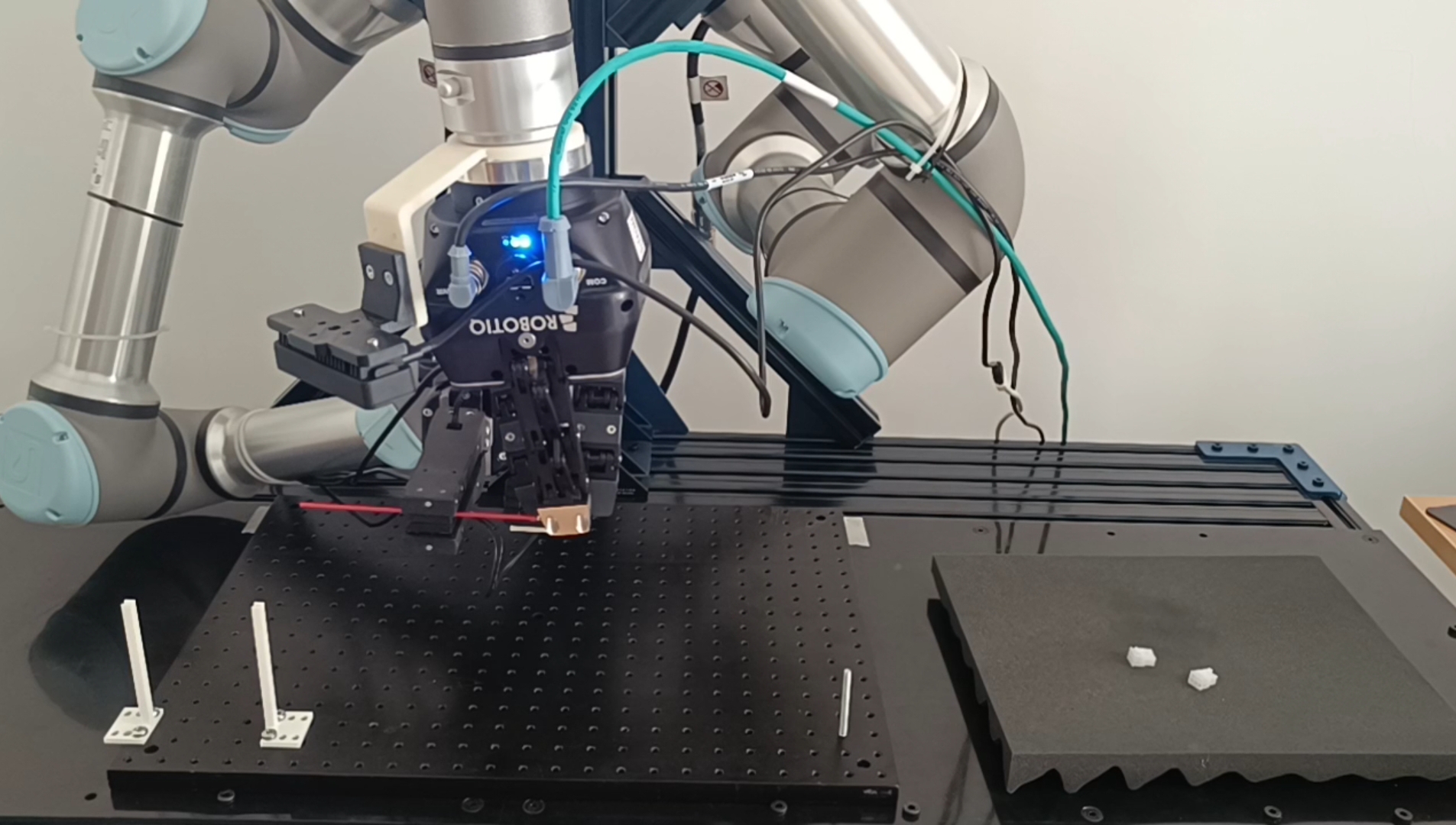
Our setup includes a collaborative robot with a parallel gripper equipped with tactile sensors and an RGB camera.
This system enables:
- Wire position and orientation estimation between the gripper fingers.
- Pin orientation correction using visual feedback.
- Force monitoring during insertion using tactile sensing and contact indicators.
- Preliminary trials achieved a 60% success rate, and ongoing refinements are improving consistency and accuracy.
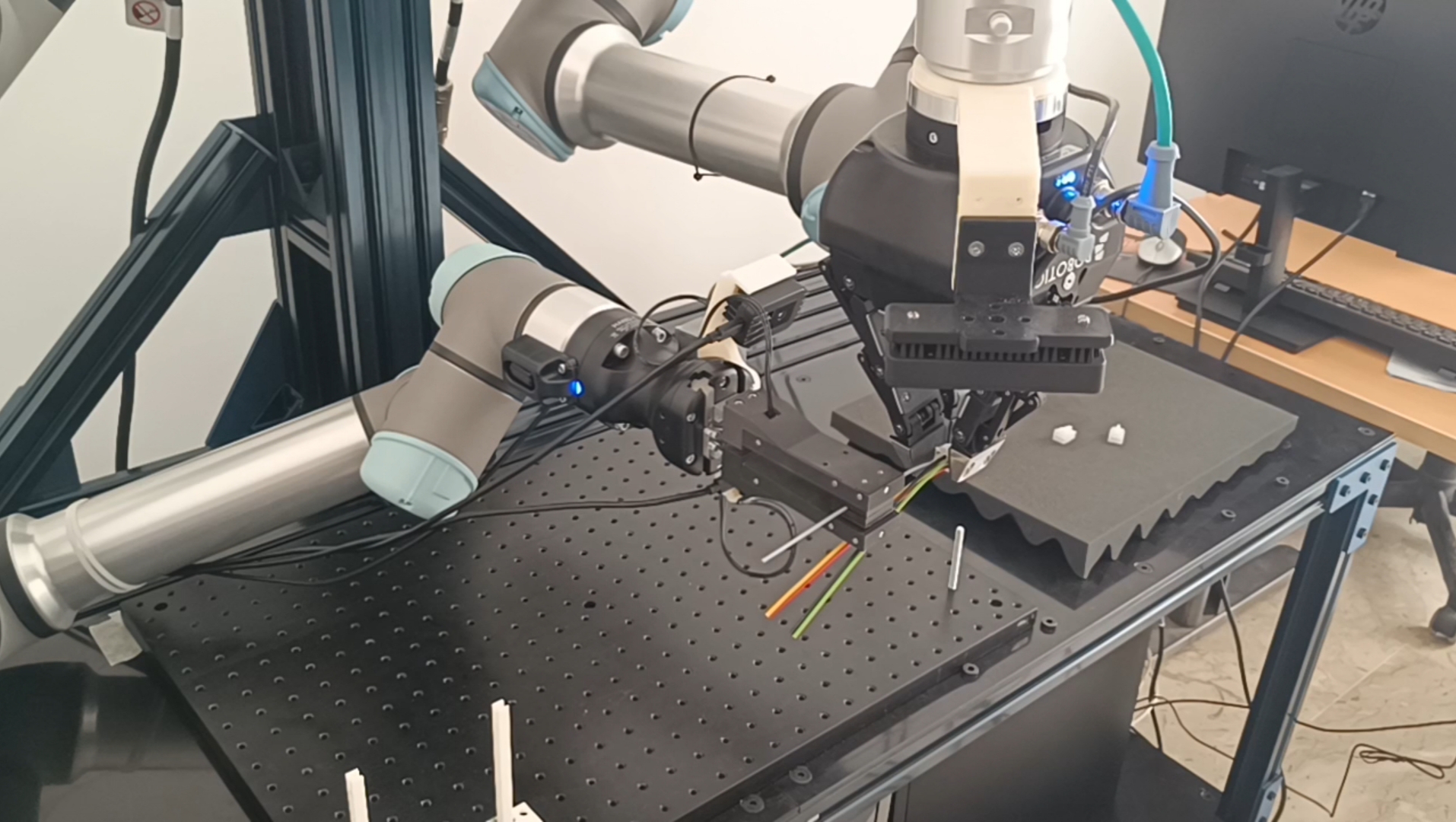
The Next Development Step: Dual-Cobot Collaboration
The next phase at ELVEZ introduces two UR5 collaborative robots working together:
- The first cobot picks up and positions the connector.
- The second cobot grips the crimped wire, rotates it for correct alignment, and completes the insertion.
This dual-cobot setup aims to improve process repeatability and achieve 100% assembly success rate.
And don’t worry, humans – we’re not being replaced just yet. The process is still slower than manual operation, but each improvement brings us closer to efficient, flexible, and safe human-robot collaboration.
Stay tuned as IntelliMan continues to advance the frontiers of intelligent robotic manipulation!

{kind=link}

{kind=link}