Blog
08.07.2024

How can a robot handle and manipulate deformable linear objects?
We are working on this topic considering the assembly of connectors. This task requires adaptation to different types of connectors, number and types of pins, insertion sequence, force, orientation and displacement requirements, as well as, obviously, the manipulation of the cables. During the pin insertion, a particular force profile must be recognized, and a suitable pulling force must be resisted in order to verify the insertion is correctly executed.
IntelliMan aims to enable the robotic assembly of connectors leveraging AI-powered manipulation, and the main tools for exploiting machine learning techniques are cameras and tactile sensors. Our tactile sensors are mounted on a commercial parallel gripper assembled on a collaborative robot.
Our solution includes:
· Estimation of the position and orientation of the wire between the fingers using our tactile sensors.
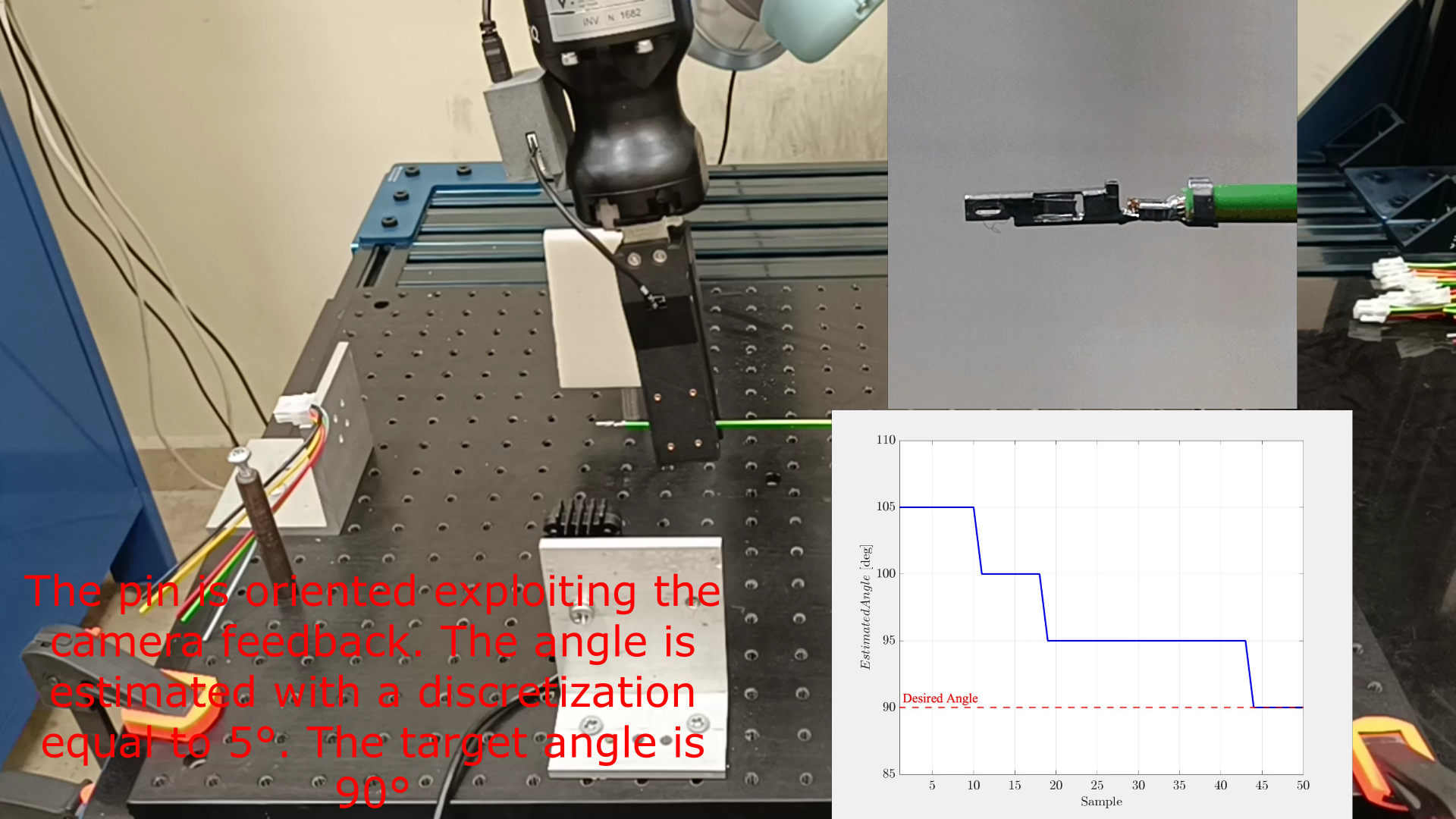
· Correction of the pin orientation using a RGB camera.
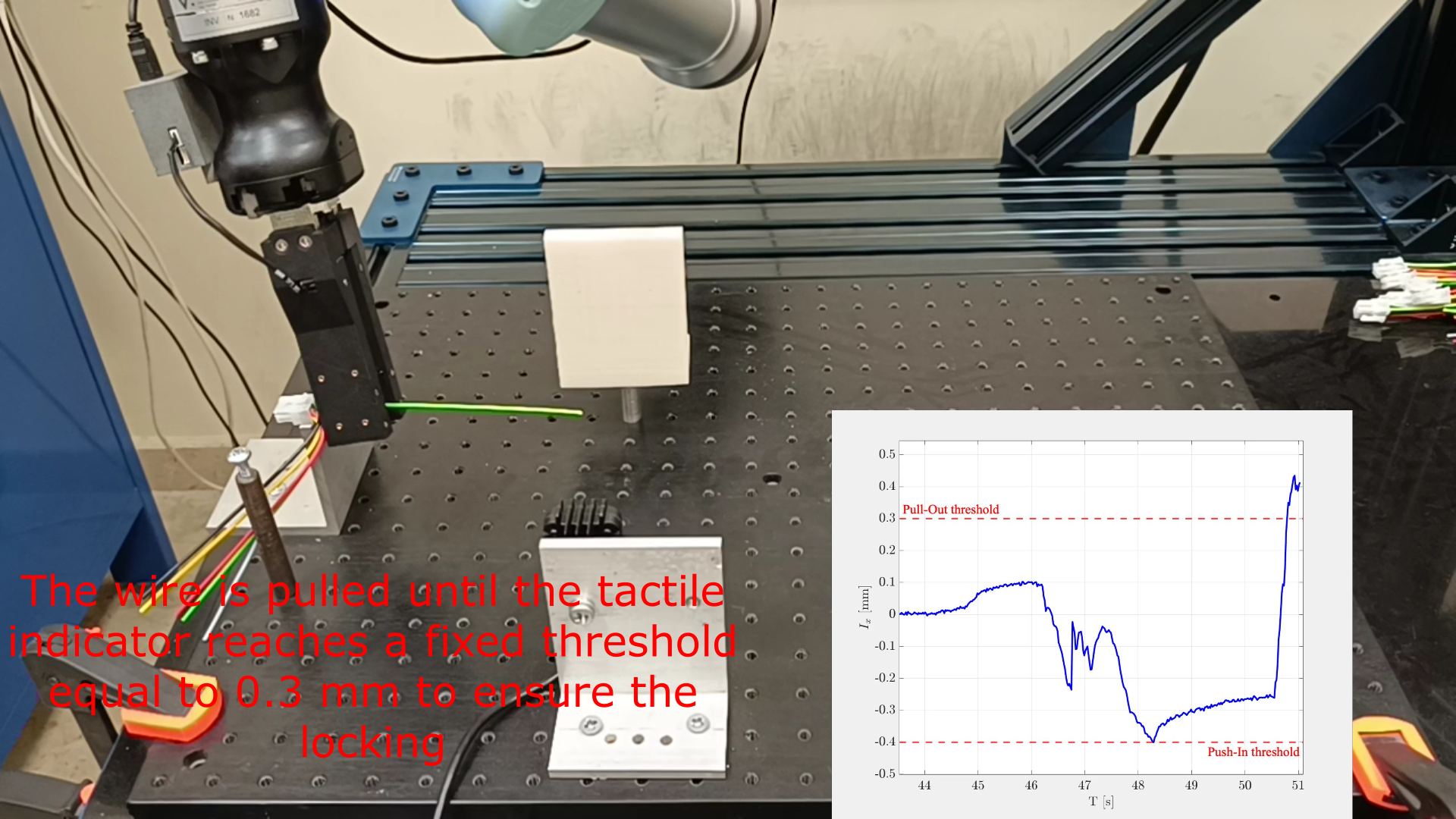
· Monitoring of the required force for the insertion phase through the tactile sensors exploiting a contact indicator.
Preliminary results have shown a success rate equal to 60%, and we are working to improve this performance indicator.
Stay tuned for further advancements and new solutions.