
A Step Forward in Autonomous Connector Assembly
We are proud to announce that the paper “Towards Automated Connector Assembly: Wire Insertion Combining Tactile and Vision Sensors”, presented at the IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM) 2025 in Hangzhou, was selected as a Best Conference Paper Award finalist.

The work is the result of a collaboration between Università degli Studi della Campania “Luigi Vanvitelli” and Università di Bologna.
Technical Highlights
Connector assembly is a crucial and still largely manual task in high-precision sectors such as automotive, aerospace, and electronics. The challenge stems from the flexible nature of wires and the fine precision required to insert terminals (pins) into tight connector cavities.
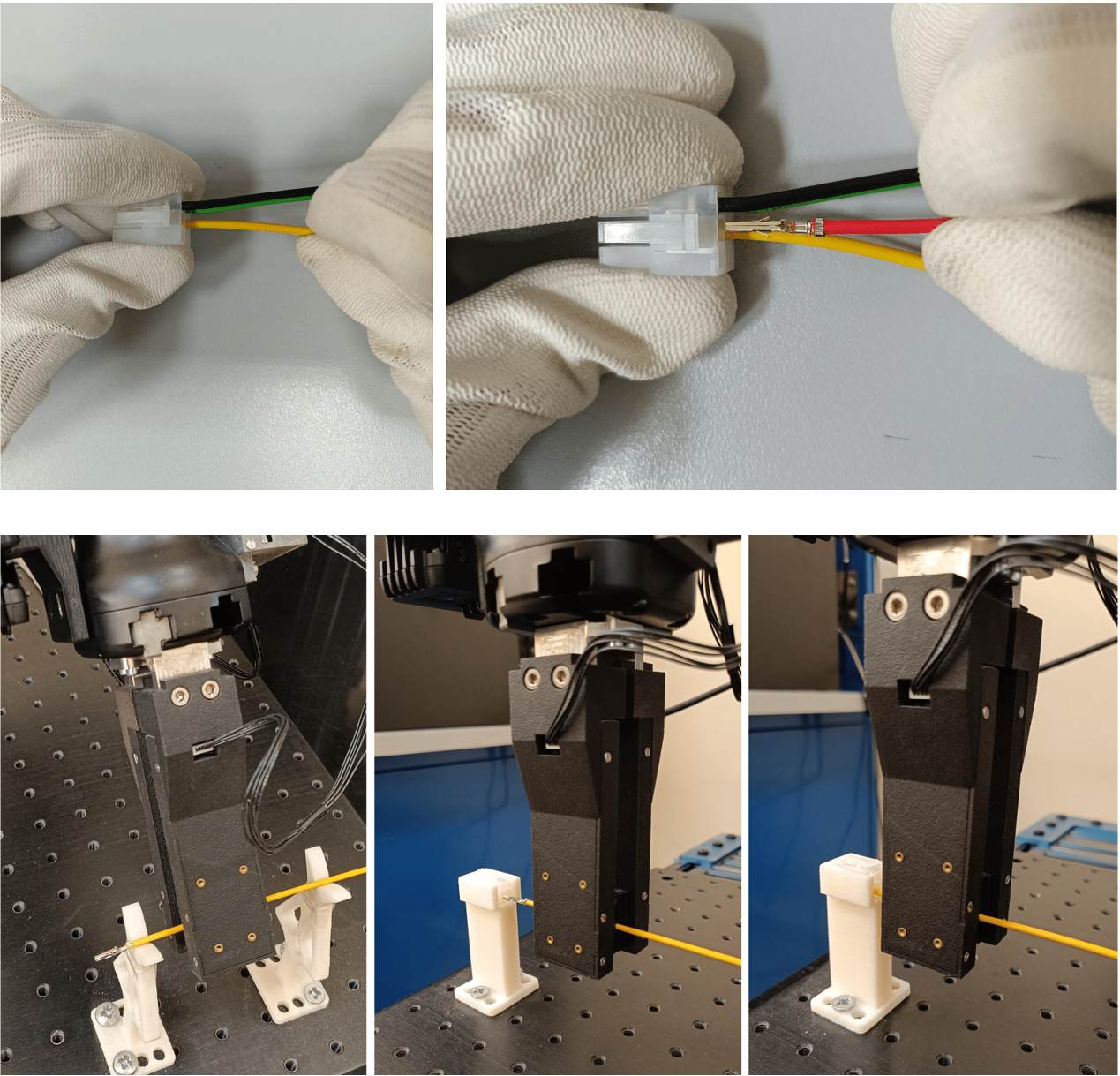
This paper proposes a novel methodology that combines robotic manipulation, tactile sensing, and computer vision to automate this process. The approach relies on a robotic arm equipped with:
- A parallel-jaw gripper with sensorized fingers to perceive the shape and position of the wire.
- An RGB camera to estimate the pin’s orientation for proper alignment.
During the insertion phase, tactile feedback is used to detect features that confirm successful engagement, followed by a pull test to ensure the connector is properly locked.
By leveraging data-driven techniques to process tactile and visual information, the system ensures high precision and robustness in executing the assembly task. Experimental validation on a real robotic setup confirms the method’s feasibility and reliability — a promising step toward fully autonomous connector assembly in real-world applications.

{kind=link}